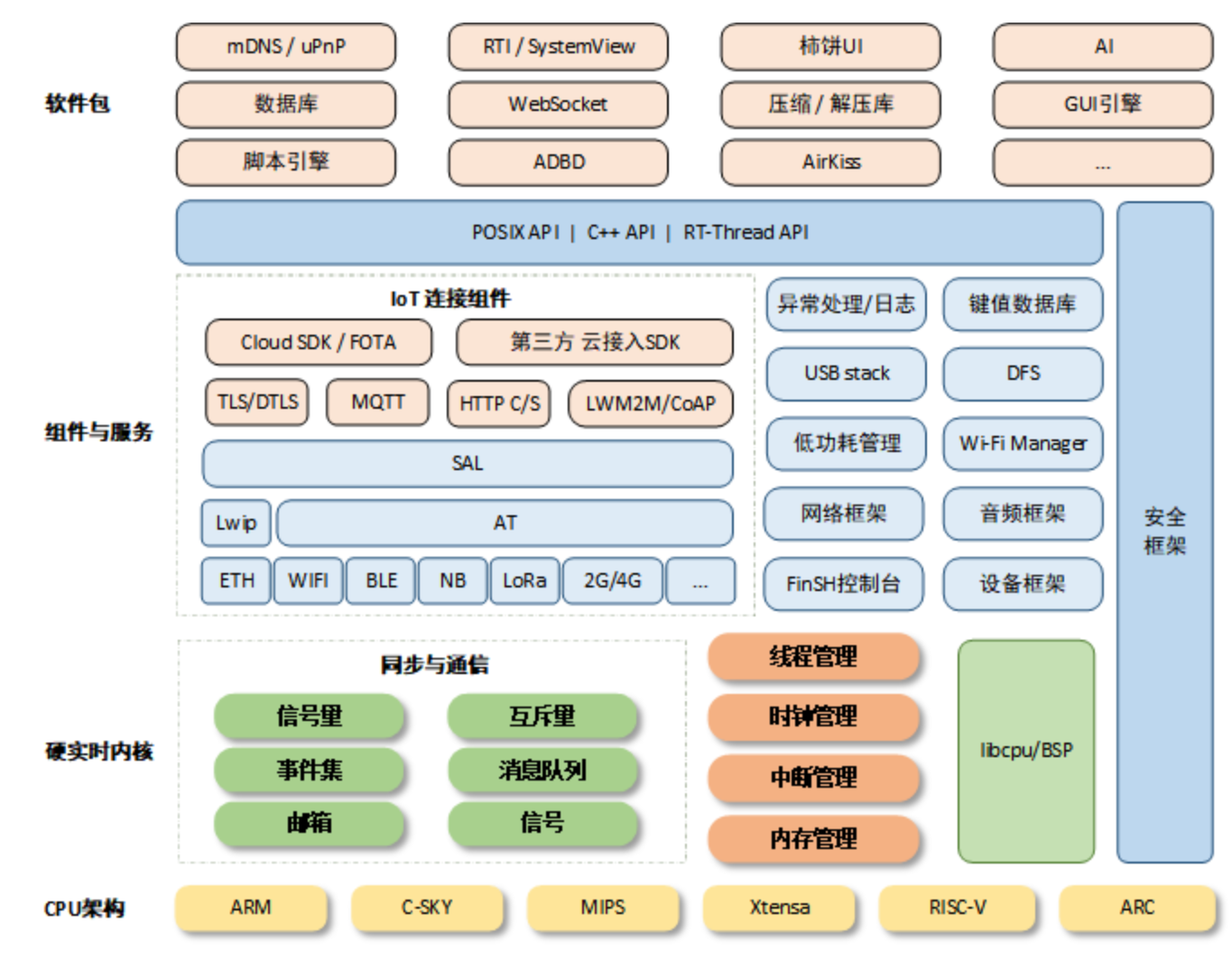
RT-Thread 是一个集实时操作系统(RTOS)内核、中间件组件和开发者社区于一体的技术平台,由熊谱翔先生带领并集合开源社区力量开发而成,RT-Thread 也是一个组件完整丰富、高度可伸缩、简易开发、超低功耗、高安全性的物联网操作系统。RT-Thread 具备一个 IoT OS 平台所需的所有关键组件,例如GUI、网络协议栈、安全传输、低功耗组件等等。经过11年的累积发展,RT-Thread 已经拥有一个国内最大的嵌入式开源社区,同时被广泛应用于能源、车载、医疗、消费电子等多个行业,累积装机量超过 8亿 台,成为国人自主开发、国内最成熟稳定和装机量最大的开源 RTOS。
RT-Thread 拥有良好的软件生态,支持市面上所有主流的编译工具如 GCC、Keil、IAR 等,工具链完善、友好,支持各类标准接口,如 POSIX、CMSIS、C++应用环境、Javascript 执行环境等,方便开发者移植各类应用程序。商用支持所有主流MCU架构,如 ARM Cortex-M/R/A, MIPS, X86, Xtensa, C-Sky, RISC-V,几乎支持市场上所有主流的 MCU 和 Wi-Fi 芯片。
市面上比较常见的esp8266和esp32芯片也可以使用RTOS进行开发,这两款芯片都比较容易上手,成本也比较低。
RTOS架构
资料教程截图

RT-Thread OS开源物联网操作系统开发视频教程目录│文件列表:
├ 第10章-I2C设备
│ ├ 01-视频
│ │ │ 01-I2C总线介绍.mp4
│ │ │ 02-I2C时序.mp4
│ │ │ 03-I2C协议分析.mp4
│ │ └ 04-I2C总线接口.mp4
│ ├ 03-PPT
│ │ └ RT-Thread OS.docx
├ 第1章-RT-Thread介绍
│ ├ 01-视频
│ │ │ 01-课程介绍.mp4
│ │ │ 02-RT-Thread介绍.mp4
│ │ │ 03-RT-Thread发展历史.mp4
│ │ └ 04-RT-Thread架构介绍.mp4
│ ├ 03-PPT
│ │ └ 第1章-RT-Thread介绍.pdf
│ └ 04-资料
│ │ RT-Thread OS.docx
│ └ rtthread-programming-manual.pdf
├ 第2章-RT-Thread移植
│ ├ 01-视频
│ │ │ 01-RT-Thread版本介绍.mp4
│ │ │ 02-标准版RTT工程创建.mp4
│ │ └ 03-RTT时钟配置和FinSH组件添加.mp4
│ ├ 03-PPT
│ │ └ 第2章-RT-Thread移植.pdf
│ └ 04-资料
│ │ RT-Thread_Studio-v2.1.0-setup-x86_64_20210330-1200.exe
│ ├ 01-数据手册
│ │ │ STM32F103x8B_DS_CH_V10.pdf
│ │ │ STM32中文参考手册2010.pdf
│ │ │ STM32参考手册中文版(寄存器).pdf
│ │ └ STM8和STM32产品选型手册.pdf
│ ├ 02-原理图
│ │ └ STM32F103C8T6-Board-原理图.pdf
│ └ 03-图片
│ │ st-link下载器.png
│ └ stm32f103c8t6核心板.png
├ 第3章-RT-Thread内核介绍
│ ├ 01-视频
│ │ │ 01-内核框架及线程调度介绍.mp4
│ │ │ 02-内核功能介绍说明.mp4
│ │ │ 03-RTT内核启动流程之汇编阶段.mp4
│ │ └ 04-RTT内核启动流程之C阶段.mp4
│ ├ 02-代码
│ │ │ startup_stm32f103xb.S
│ │ └ system_stm32f1xx.c
│ ├ 03-PPT
│ │ └ 第3章-RT-Thread内核介绍.pdf
├ 第4章-线程管理
│ ├ 01-视频
│ │ │ 01-线程控制块.mp4
│ │ │ 02-线程属性.mp4
│ │ │ 03-线程状态切换.mp4
│ │ │ 04-线程动态创建和删除函数.mp4
│ │ │ 05-动态创建线程实例.mp4
│ │ │ 06-启动线程.mp4
│ │ │ 07-静态创建线程.mp4
│ │ │ 08-线程辅助函数.mp4
│ │ └ 09-调度器钩子函数.mp4
│ ├ 02-代码
│ │ └ main.c
│ ├ 03-PPt
│ │ └ RT-Thread OS.docx
├ 第5章-时钟管理
│ ├ 01-视频
│ │ │ 01-时钟节拍.mp4
│ │ │ 02-获取时钟节拍.mp4
│ │ │ 03-定时器介绍.mp4
│ │ │ 04-系统定时器初始化简介.mp4
│ │ │ 05-定时器工作机制.mp4
│ │ │ 06-动态创建定时器.mp4
│ │ │ 07-静态创建定时器.mp4
│ │ │ 08-定时器控制函数.mp4
│ │ └ 09-高精度延时函数.mp4
│ ├ 02-代码
│ │ └ main.c
│ ├ 03-PPT
│ │ └ RT-Thread OS.docx
├ 第6章-线程间同步
│ ├ 01-视频
│ │ │ 01-同步机制介绍.mp4
│ │ │ 02-信号量介绍.mp4
│ │ │ 03-动态创建信号量.mp4
│ │ │ 04-静态创建信号量.mp4
│ │ │ 05-获取释放信号量.mp4
│ │ │ 06-信号量同步实例.mp4
│ │ │ 07-互斥量介绍及动态创建.mp4
│ │ │ 08-互斥量静态创建和脱离.mp4
│ │ │ 09-互斥量实例.mp4
│ │ │ 10-事件集介绍及动态创建.mp4
│ │ └ 11-事件集实现线程同步.mp4
│ ├ 02-代码
│ │ ├ 01-信号量
│ │ │ └ main.c
│ │ ├ 02-互斥量
│ │ │ ├ 互斥量创建
│ │ │ │ └ main.c
│ │ │ └ 实例
│ │ │ └ main.c
│ │ └ 03-事件集
│ │ └ main.c
│ ├ 03-PPT
│ │ └ RT-Thread OS.docx
├ 第7章-IO设备模型
│ ├ 01-视频
│ │ │ 01-IO设备模型介绍.mp4
│ │ │ 02-创建和注册IO设备.mp4
│ │ │ 03-访问IO设备.mp4
│ │ └ 04-设备模型实例.mp4
│ ├ 02-代码
│ │ │ drv_demo.c
│ │ └ main.c
│ ├ 03-PPT
│ │ └ RT-Thread OS.docx
├ 第8章-Uart串口设备
│ ├ 01-视频
│ │ │ 01-串口概述.mp4
│ │ │ 02-串口相关接口.mp4
│ │ │ 03-中断方式接收分析.mp4
│ │ │ 04-应用层串口编程实例1.mp4
│ │ │ 05-串口中断接收.mp4
│ │ └ 06-串口DMA接收数据.mp4
│ ├ 02-代码
│ │ ├ DMA
│ │ │ └ main.c
│ │ └ 中断
│ │ └ main.c
│ ├ 03-PPT
│ │ └ RT-Thread OS.docx
└ 第9章-ADC设备
├ 01-视频
│ │ 01-ADC介绍.mp4
│ │ 02-ADC访问接口.mp4
│ └ 03-ADC实例.mp4
├ 02-代码
│ └ main.c
├ 03-PPT
│ └ RT-Thread OS.docx
评论(0)